About Me

2+ Years
Robotics Software Engineering
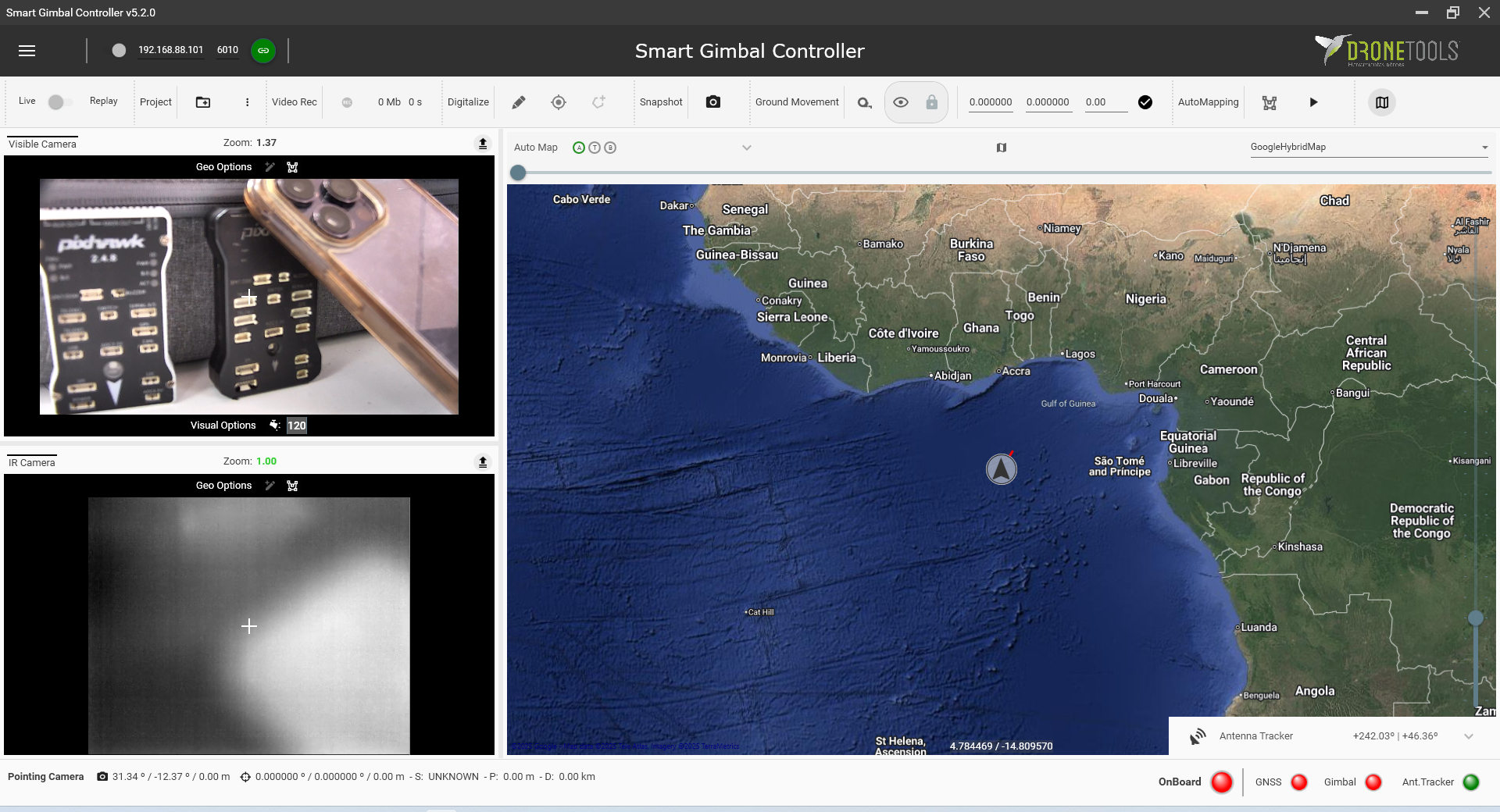
I design and ship autonomy software for robots operating in GPS-denied and dynamic environments. My focus is SLAM, state estimation, navigation, and perception pipelines that must run reliably in real time.
At Dronetools, I work on autonomous drone navigation and operator systems that connect low-level control, sensor fusion, and mission workflows. I also competed in TEKNOFEST Robotaxi for 3 consecutive years with Team Mekatek, improving the system every year and helping the team reach 3rd place plus Best Team Spirit Award. I am open to relocation for robotics roles in the Netherlands, Switzerland, and Germany.
Robotics Skill Matrix
Core Robotics Engineering
C++
Python
ROS 2
Real-time Systems
Multithreaded Pipelines
Docker
Perception & SLAM
LiDAR-Inertial Odometry
FAST-LIO
Sensor Fusion
OpenCV
YOLO-based Detection
Video Stabilization & Tracking
Navigation, Control & Deployment
3D ESDF Planning
Autonomous Decision-Making
MAVLink (PX4/ArduPilot)
GStreamer/RTSP
CUDA + NVIDIA Jetson
WPF/Qt Operator Tools